アメリカの宇宙企業Astrobotic Technology(アストロボティック・テクノロジー)は現地時間2026年6月15日、月着陸ミッション「Griffin Mission One(Griffin-1)」で使用する月着陸船「Griffin(グリフィン)」を、ペンシルベニア州ピッツバーグにある本社施設で公開しました。公開にはNASAや政府、産業界の関係者らが出席し、クリーンルーム内で機体が披露されました。
民間月面輸送として最大級のペイロードを月面へ
Griffin-1は、NASAの商業月面輸送サービス「CLPS(Commercial Lunar Payload Services)」の枠組みで進められている月着陸ミッションです。将来の月面活動を支える商業輸送のひとつとして、観測機器や探査車などを月面へ届ける役割を担います。
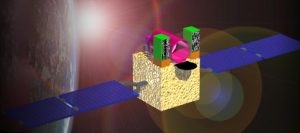
Griffin着陸船は幅4.5m、高さ2.0mで、最大625kgのペイロードを月面に届ける能力を持ちます。Astroboticによると、Griffin-1は民間による月面輸送として過去最大のペイロード輸送ミッションになるとされています。
着陸地点は、月の南極域にあるノビレ・クレーター付近が予定されています。Griffinは、搭載カメラの画像を地形データと照合して位置を推定する地形相対航法(TRN)や、レーザーを使って地表までの距離や相対速度を測るドップラーLiDARを用いた自律航法システムを備えています。これにより、起伏のある地形でも高精度な着陸を目指します。
搭載ペイロードと月面探査の構想
Griffin-1には、複数のペイロードが搭載される予定です。カナダのMission Control Space Servicesが関わる「BEACON」は、Astroboticの小型月面ローバー「CubeRover」を用いた月面探査実証です。また、ESA(ヨーロッパ宇宙機関)の「LandCam-X」は、着陸時の観測や将来の着陸技術向上に役立てられる機器です。
主要なペイロードのひとつが、Astrolab(アストロラボ)社が開発した月面ローバー「FLIP」で、月面での移動、物資輸送、自律運用といった能力を実証します。AstrolabのJaret Matthews CEOは、月面で持続的な活動を行うには、貨物や機材、将来的には宇宙飛行士を移動させる能力が必要になるという趣旨のコメントをしています。
なお、Griffin-1では当初、NASAの水氷探査ローバー「VIPER」を月面へ届ける計画でした。しかしNASAは2024年7月、コスト増などを理由にVIPERミッションの中止を決定しています。その後、VIPERはBlue Origin(ブルーオリジン)の月着陸船「Blue Moon」で2027年後半に月面へ送られる計画となっています。
環境試験を経て2026年後半の打ち上げへ
Griffin着陸船は今後、カリフォルニア州の環境試験施設へ輸送され、打ち上げ時や宇宙飛行中、月面での環境に耐えられるかを確認する一連の環境試験に入ります。その後、フロリダ州の打ち上げ拠点へ移送され、AstrolabのFLIPローバーを搭載したうえで、SpaceX(スペースX)の大型ロケット「Falcon Heavy(ファルコン・ヘビー)」による2026年後半の打ち上げが計画されています。
打ち上げ後は、ピッツバーグにあるAstroboticのミッション管制センターから、月への移動、着陸、月面運用が管制される予定です。
文・編集/sorae編集部
関連記事
- 月で氷を探査するNASAの「VIPER」ミッションが復活 ブルーオリジンの着陸船で月へ
- アストロボティック、イタリア宇宙機関の月面居住モジュール「MPH」向け車輪の開発を受注
- 米民間企業の月着陸船「ペレグリン」推進システムで問題発生 月着陸の見込みなし
- アストロボティック、月着陸船の打ち上げにファルコン・ヘビーを選定
参考文献・出典
- Astrobotic - Griffin-1 Lunar Lander Unveiled Ahead of Environmental Testing
- NASA - CLPS Flight: Astrobotic's Griffin Mission One
- Astrobotic - Griffin Lander
- Astrobotic - Moon Manifest