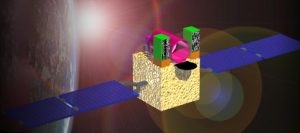
薄暗い砂漠の大地を背景に、赤いライトで足元を照らしながら荒野にたたずむ、1台の探査車。こちらは、NASA(アメリカ航空宇宙局)のJPL(ジェット推進研究所)が公開した、次世代探査車(ローバー)のプロトタイプ「ERNEST(アーネスト)」のテスト風景です。

2026年3月にアメリカ・カリフォルニア州南部のコロラド砂漠で行われたフィールド試験において、ERNEST(Exploration Rover for Navigating Extreme Sloped Terrain=極限傾斜地形ナビゲーション探査車)は人間の介入を最小限に抑えながら、37時間で約16マイル(約26キロメートル)を自律的に走行することに成功しました。
月面の極域のような長く深い影を想定して、夕暮れ、夜明け、そして夜間にもテストが行われたこの車両は、一体どのようなミッションを背負っているのでしょうか。
従来の探査車が抱える課題と新たな目標
JPLによると、過去30年間にわたるNASAの火星探査車は、一貫して「ロッカー・ボギー(rocker-bogie)」と呼ばれるサスペンション機構を採用してきました。これは起伏に合わせて各車輪の接地を保つ優れた受動的なシステムですが、急勾配、極端な段差、柔らかい砂地といった地形では、立ち往生してしまうリスクがありました。
しかし、将来の月面探査や火星探査では、これまで到達できなかったクレーターの内部や、険しい地形の調査も求められていきます。さらに、現在の探査車をはるかにしのぐ速度と走行距離の達成も、不可欠なものとなります。こうした課題を克服するため、ERNESTの開発プロジェクトがスタートしたのです。
アクティブサスペンションとAIによる自律的な走破能力
ERNESTは全長約1.2メートルの4輪ローバーです。開発チームは、月の模擬土壌を用いた小型の初期プロトタイプ(「Asterix」および「Obelix」)による数か月の実験を経て、現在の機体設計にたどり着きました。
最大の特徴はそのサスペンションで、従来のローバーのようなエネルギー効率の良いパッシブモードと、地形に合わせて車体姿勢を能動的に制御するアクティブモードを切り替えられる点にあります。
この機構により、ERNESTは各車輪を個別に持ち上げて障害物を乗り越えたり、「身をよじる(squirming)」「車輪歩行(wheel-walking)」といった、特殊な“歩行モード”で移動したりすることが可能です。また、4輪すべてが独立したステアリングに対応しているため、真横を含めたあらゆる方向へスムーズに進むことができます。

さらに画期的なのは、その「自律性」です。JPLの開発チームによれば、AI(人工知能)の学習手法の一種である強化学習(試行錯誤を通じて最適な行動を学習する手法)を用いて、仮想シミュレーター上で訓練が行われました。
同時並行的に処理を行うことで、実際には週末1回ぶんの時間に、何千時間もの訓練を行うことができたといいます。訓練の結果、従来の探査車では動けなくなってしまうような障害物に対しても、AIが自ら考えてアクティブサスペンションを駆使し、自律的に乗り越える能力を獲得したといいます。
月や火星での「科学のロードトリップ」に向けて
今回の砂漠でのフィールドテストでは、最高時速約1kmでの走行が確認されました。これは現在火星で活動している探査車と比べて、約10倍の速度にあたります。
JPLの惑星科学者James Keane氏が「この車両なら月や火星で科学のロードトリップができるだろう」と語るように、ERNESTのフィールドテストを通じて、長距離かつ高速な探査ミッションの実現可能性が示されました。

研究チームは今後、アクティブサスペンションの適切な使用判断と、より広範囲にわたる長距離ナビゲーションを統合する新たな自律走行プロジェクトに着手すると述べています。自ら危険を回避し、険しい地形をものともしない次世代探査車の技術は、人類の未踏の領域を切り拓く重要な鍵となりそうです。
文/ソラノサキ 編集/sorae編集部
関連記事
- NASAが火星探査車「Perseverance」の最新セルフィー公開 西に進んだ先で待っていた景色
- NASAがESA火星探査車「ロザリンド・フランクリン」支援を本格スタート 2028年打ち上げへ
- 史上初、火星探査車が「AIが計画したルート」で走行 大規模言語モデル「Claude」を活用