【2023年3月2日14時37分】株式会社ispaceは2023年2月28日、同社の月面探査プログラム「HAKUTO-R」ミッション1が後半の段階に入るにあたり、中間成果報告を発表しました。発表時点でミッション1のランダー(無人月着陸船)は引き続き月に向けて飛行しています。
民間初の月面着陸を目指すHAKUTO-Rミッション1のランダーは、2022年12月11日16時38分(日本時間・以下同様)に米国フロリダ州のケープカナベラル宇宙軍基地からスペースXの「ファルコン9」ロケットで打ち上げられました。同ミッションは「ランダーの設計及び技術の検証」と「月面輸送サービスと月面データサービスの提供という事業モデルの検証及び強化」を目的としており、ランダーは2023年4月に月の「氷の海」の南東に位置するアトラス・クレーターに着陸する予定です。
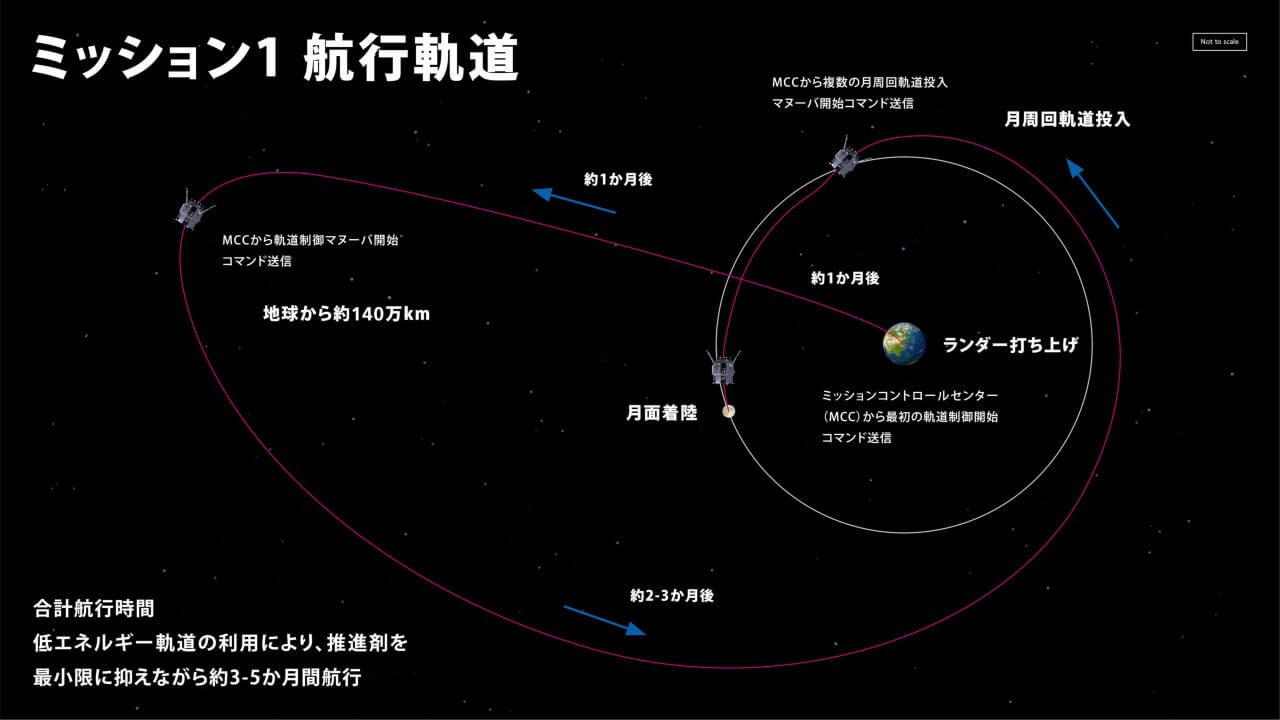
ミッション1ランダーは地球や月から一旦離れた後で再び戻ってくるような軌道を描く、低エネルギー遷移軌道(low-energy transfer orbit)を飛行しています。飛行に時間はかかるものの、低エネルギー遷移軌道には少ない推進剤で月へ向かうことができるメリットがあります。ispaceによると、Success 5完了後の2023年1月20日にミッション1ランダーは月への航路の折り返し地点とも言える、本ミッションで地球から最も遠ざかる約137万6000kmの地点に到達しました。同社はこの距離について、民間資本で開発され商業的に運用された宇宙機が到達した地球からの最遠記録だとしています。地球からの最遠地点を通過したランダーは月へ向かう飛行を続けており、2月27日時点で地球からの距離は約80万kmまで縮まっています。
発表ではミッション1ランダーの各サブシステムの状況や航行状況が報告されています。それによると、打ち上げ直後の通信や姿勢制御の不安定、太陽からの入射熱による一部RCSスラスターの高温状態といった一時的な問題が発生し、初期運用の完了までに当初の計画よりも長い時間が掛かったものの、運用チームの迅速な対応によって解決策が適用されたことで、現在までの2か月以上に渡る安定運用が実現。ペイロードの一部でも問題が生じたものの、顧客側と恊働で対策した結果、機能が回復したということです。ispaceは、打ち上げからこれまでは運用の各段階におけるサブシステムの検証を行ってきたが、今後は月面着陸に向けて各サブシステムが計画通り機能するかどうかの検証を実施するとしています。
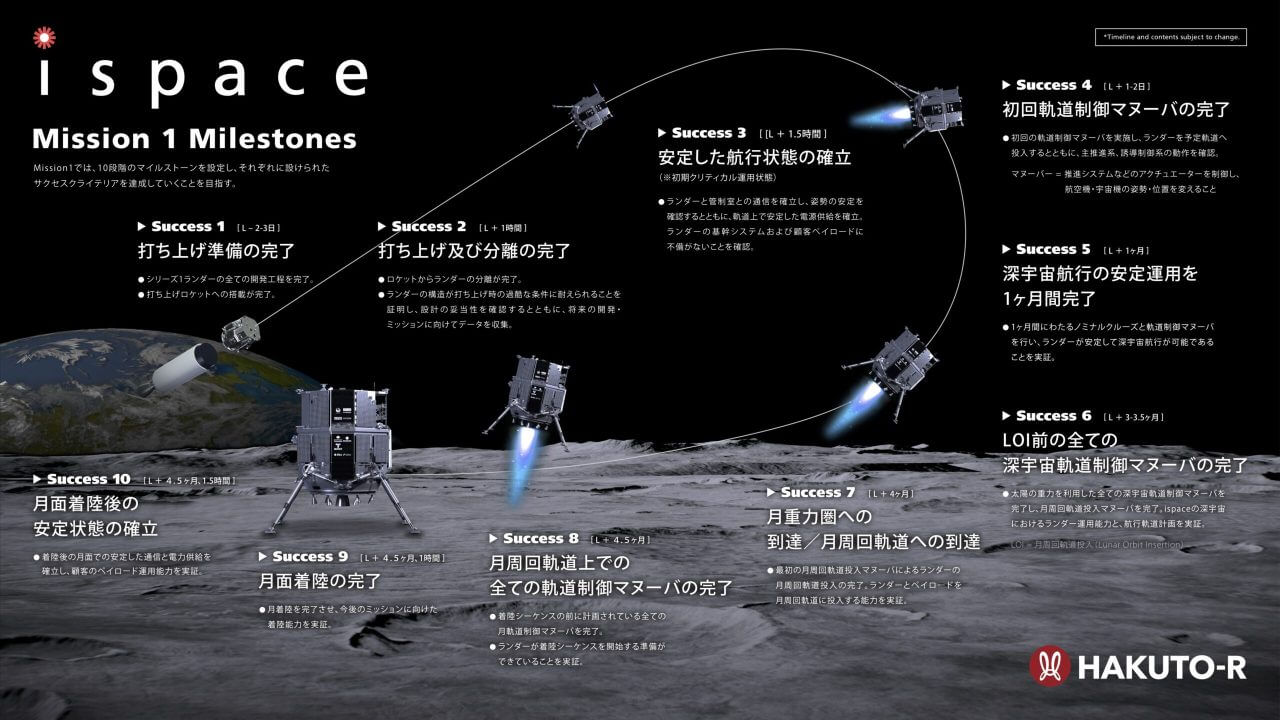
HAKUTO-Rミッション1では打ち上げから月面着陸までの各段階に応じて10のマイルストーンが設定されていて、Success 4「初回軌道制御マヌーバの完了」までの4つは2022年12月のうちに完了。打ち上げから1か月が経った2023年1月11日にSuccess 5「深宇宙航行の安定運用を1ヶ月間完了」が完了したことで、これまでにマイルストーンの半分が完了したことになります。2023年3月中旬頃にはSuccess 6「LOI(※)前の全ての深宇宙軌道制御マヌーバの完了」が、2023年3月下旬頃にはSuccess 7「月重力圏への到達/月周回軌道への到達」がそれぞれ完了する見込みです。
※…LOI:Lunar Orbital Insertion=月周回軌道投入の略。
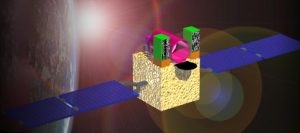
HAKUTO-Rミッション1ランダーに搭載されているペイロードは以下の通りです。
・日本特殊陶業株式会社(HAKUTO-Rコーポレートパートナー)の固体電池
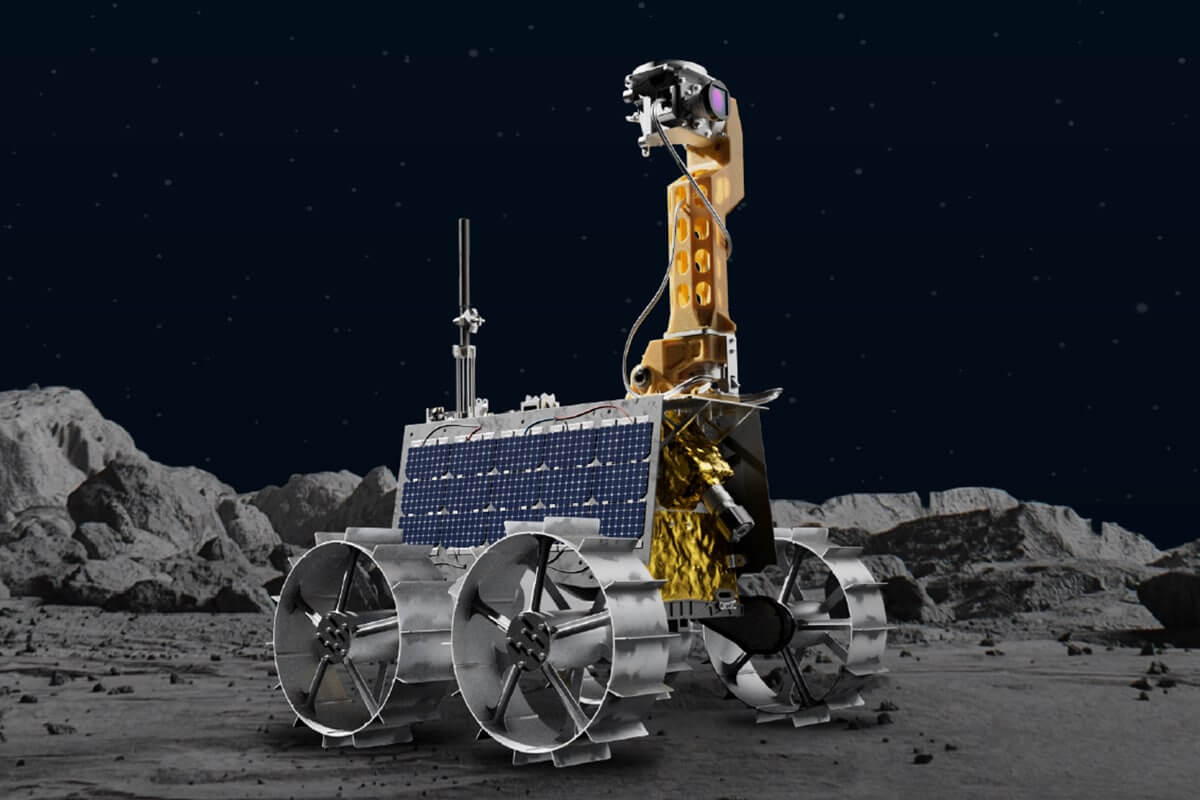
・アラブ首長国連邦(UAE)ムハンマド・ビン・ラシード宇宙センター(MBRSC)の月面探査車「Rashid(ラシード)」
・株式会社タカラトミー等が開発した変形型の月面探査ロボット「SORA-Q(LEV-2)」
・カナダのMCSS社が開発した人工知能(AI)を用いたフライトコンピューター
・カナダのCanadensys社のカメラ
・HAKUTOのクラウドファンディング支援者の名前を刻印したパネル
・サカナクションの「SORATO」(HAKUTO※応援歌)の楽曲音源を収録したミュージックディスク
※…HAKUTOは民間初の月面無人探査を競うコンテスト「Google Lunar XPRIZE」に日本から参加したチームで、HAKUTO-Rの前身にあたる。Google Lunar XPRIZEは勝者がないまま2018年に終了。

Source
- Image Credit: ispace, タカラトミー, MBRSC
- ispace - ispace、ミッション1の中間成果報告を発表
- ispace_HAKUTO-R (Twitter)
文/sorae編集部