JAXA(宇宙航空研究開発機構)、タカラトミー、ソニーグループ、同志社大学の共同開発チームは2026年6月18日、小型月着陸実証機「SLIM」に搭載された変形型月面ロボット「LEV-2」、愛称「SORA-Q」による月面実証成果をまとめた論文が、学術誌「Science Robotics」に掲載されたことを発表しました。
SORA-Qとは
SORA-Qは直径約8cm・質量約250gの月面探査ロボットで、着陸後に左右へ分割する車輪を兼ねた球体状の外殻が特徴です。車輪は左右独立して偏心回転させることが可能で、走行モードを切り替えることで平坦地だけでなく傾斜地での移動も可能とされています。
超小型月面探査ローバー「LEV-1」とともにSLIMに搭載されたSORA-Qは、日本時間2024年1月20日に月面へ到達寸前のSLIMから分離し、着陸することに成功。搭載していた2つのカメラのうち、フロントカメラで撮影された画像にはSLIMの姿が見事に捉えられており、話題を呼びました。エンジンのトラブルをきっかけに大きく傾いて着陸することになったSLIMの姿を、ご記憶の方も多いことでしょう。

- JAXAが月探査機「SLIM」によるピンポイント着陸成功を発表 探査ロボットが撮影した画像も公開(2024年1月25日)
LEV-1を経由してSORA-Qが画像の送信に成功したことで、両機は「日本初の月面探査ロボット」になったとともに、「世界初の完全自律ロボットの月面探査」「世界初の複数ロボットによる同時月面探査」を達成したとされています。また、SORA-Qは「世界最小・最軽量の月面探査ロボット」という記録も達成しました(※2024年1月20日時点)。
超小型探査車が直面する月面の過酷な環境
これまでの月面や火星表面の探査では、大型で高機能な探査車(ローバー)が活躍してきました。しかし、そのような探査車の開発や打ち上げには、莫大なコストがかかるという大きな課題があります。一方、SORA-Qのような超小型探査車には低コストで探査に投入できる利点があるものの、実用化には多くの技術的なハードルがありました。
JAXAによると、特に月面では柔らかな砂であるレゴリス(月の土壌)に小さな車輪が沈み込んでしまい、移動が困難になるという問題がありました。また、利用できる電力や処理能力が限られているうえに、通信も不安定な環境の下では、地上からの遠隔操作に頼ることなく、探査車が自律的に判断して動くための能力が不可欠でした。
完全自律探査と独自機構の実証 新規画像も公開
今回Science Roboticsに掲載された論文では、こうした小型の探査車に特有の制約を克服するための機構設計と自律制御技術が、実際の月面環境で有効に機能したことが報告されています。
JAXAなどによると、SLIMからの分離後に月面へ到達したSORA-Qは、起動、姿勢制御、移動、撮影、それに取得した画像から重要なものを選別して送信するまでの一連の動作を、完全自律で成し遂げることができました。
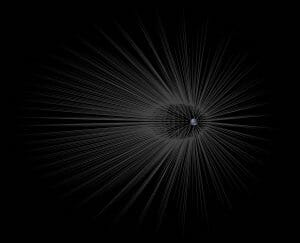
また、今回の発表にあわせて、SORA-Qのリアカメラで撮影された2枚目の画像が新たに公開されています。通信途絶にともなってデータの欠損が生じており、左側の一部だけが復元されたものですが、すでに公開されているフロントカメラの画像と比較解析した結果、2枚の画像を取得する間にSORA-Qは月面で約0.13m移動し、約180度旋回していたことも確認されました。
このことから、レゴリスに埋もれないために編み出された偏心回転する車輪という独自の移動システムが、月面で設計通りに動作したことが裏付けられたということです。



超小型ロボットが切り拓く宇宙探査の未来
通信の制約やデータの欠損といった運用上の課題も含め、実際の宇宙環境から得られたSORA-Qの実動作データは、今後の探査ミッションにとって高い価値を持つ知見となるものです。
JAXAによれば、今回の成果を足がかりとして、今後は複数の小型ロボットを同時に運用して広範囲を効率的に探査する技術や、大型の探査車との組み合わせ、さらには洞窟や急斜面といったこれまで到達が難しかった環境への探査拡大が期待されるとしています。
手のひらサイズの超小型探査車が遺した確かな実績は、人類の宇宙活動をさらに加速させる可能性を秘めていると言えるでしょう。
文/ソラノサキ 編集/sorae編集部
関連記事
- JAXAが月探査機「SLIM」によるピンポイント着陸成功を発表 探査ロボットが撮影した画像も公開
- 【速報】JAXA月探査機「SLIM」通信再確立 月の起源に迫る観測を開始
- JAXA月探査機「SLIM」月面での運用を終了 日本初の月面軟着陸を達成