宇宙航空研究開発機構(JAXA)は2023年12月5日、小型月着陸実証機「SLIM」の月着陸目標日時が2024年1月20日に設定されたことをに明らかにしました。【最終更新:2023年12月6日13時台】
■降りたい場所へのピンポイント着陸技術を実証
月面へのピンポイント着陸技術を実証するために開発されたSLIMは、JAXAのX線分光撮像衛星「XRISM」とともに「H-IIA」ロケット47号機に相乗りする形で、2023年9月7日に種子島宇宙センターから打ち上げられました。打ち上げから約1か月後の2023年10月4日には地球を公転する月の重力を利用して軌道を変更する月スイングバイを実施し、現在は月を一度離れてから再び接近する軌道上で飛行を続けています。
JAXAによると、SLIMの月着陸目標日時は日本時間2024年1月20日0時20分頃です(降下開始時刻は同日0時0分頃)。このタイミングで着陸を実施しない場合、次の着陸機会は2024年2月16日頃に予定されています。着陸に先立つ2023年12月25日にSLIMは月周回軌道へ投入され、2024年1月19日までに着陸前の軌道調整が行われることになっています。

アメリカ航空宇宙局(NASA)のアポロ計画で使用された月着陸船をはじめ、従来の月探査機・月着陸船では月面に対して垂直の姿勢で着陸する方法が採用されてきました。この方法では傾斜が大きなクレーター内部の斜面などでは倒れてしまう可能性があり、安全に降りられる場所が平坦な地形に限定されます。着陸地点が科学的に興味深い場所から離れている場合、探査機に搭載した探査車や着陸船で降り立った宇宙飛行士でその場所まで移動して調査する必要がありました。
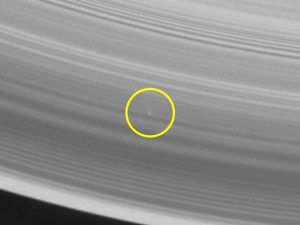
一方、SLIMは月面に対して垂直の姿勢で降下するものの、接地直前に機体を傾けて倒れるように着陸するという特徴的な方法を採用しています。垂直姿勢で着陸すると倒れてしまいかねない斜面でも、倒れた姿勢で着陸すれば対応できるというわけです。後述する観測のために選択されたSLIMの着陸予定地点は神酒(みき)の海付近にあるシオリ・クレーター(Shioli、直径約300m)の近くで、実際に斜度約15度の斜面になっています。

また、SLIMはカメラで捉えた月面の様子をリアルタイムで自律的に分析し、クレーターが分布するパターンをもとに自身の位置を測定する画像照合航法を採用しています。同航法を実現するために、地上用のものと比べて性能が限られる宇宙用のCPUでも迅速な画像処理を行うためのアルゴリズムが開発されました。
JAXAによると、近年の月探査機の着陸精度が数km~十数kmであるのに対し、SLIMは100mという高精度。調査したい岩石が存在する地形の険しいエリアや、地下に氷が埋蔵されているとみられるごく狭いエリアといった、科学的に興味深い場所への高精度な着陸の実現に貢献することがSLIMには期待されています。
■着陸後は岩石の組成を分析

SLIMには観測装置として「マルチバンド分光カメラ(MBC)」が搭載されていて、着陸後には岩石の組成を調べるための観測が行われる予定です。注目は、着陸地点周辺の岩に含まれているとみられる月の内部に由来する物質です。
月の起源を巡っては、初期の地球に火星サイズの天体が衝突した結果形成されたとする説(ジャイアント・インパクト説、巨大衝突説)が有力視されています。その場合、月のマントルの組成は地球のマントルに似ていることが予想されます。
月に隕石が衝突して形成されたクレーターの内部や周辺には、月の内部に由来する物質が露出していると考えられています。その中にはマントルに由来するかんらん石(橄欖石)を含んだ岩があるかもしれません。SLIMのMBCで調べた月のかんらん石の組成を地球のかんらん石と比較することで、月の形成と進化の謎に迫る鍵が得られるかもしれないと期待されています。
■2機の小型ローバーを搭載

なお、SLIMには「LEV-1」および「LEV-2(愛称:SORA-Q)」という2機のローバー(探査車、探査ロボット)が搭載されています。LEV-1にはバネの力で月面を蹴ってホップ(跳躍)するためのパッドが、SORA-Qには外殻を兼ねる2つの車輪が備わっていて、どちらもバッテリーが続く限り月面を移動することが可能です(LEV-1は太陽電池も装備)。
LEV-1とSORA-QはSLIMの着陸直前に分離されて月面に到達し、月面での画像取得や地球へのデータ送信を連携して行う予定です。

日本の探査機による月着陸は2022年から2023年にかけて2回試みられましたが、いずれも失敗しています。2022年11月にはJAXAの無人探査機「OMOTENASHI」がNASAの「Artemis(アルテミス)1」ミッションに相乗りして打ち上げられましたが、ロケットから放出された後の姿勢制御が計画通り進まなかったために太陽電池でバッテリーを充電できず、着陸を断念。2023年4月には株式会社ispaceによる民間月面探査ミッション「HAKUTO-R」のミッション1ランダー(着陸機)による月着陸が実施されましたが、ソフトウェアによる高度の推定に誤りがあったために推進剤が尽き、ランダーは月面へ落下・衝突しました。
成功すれば日本初、世界でも旧ソ連・アメリカ・中国・インドに次いで5か国目となるSLIMの月着陸が注目されます。
Source
文/sorae編集部