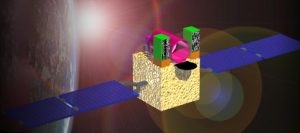
2023年9月7日(日本時間・以下同様)に打ち上げられた宇宙航空研究開発機構(JAXA)の小型月着陸実証機「SLIM(スリム)」は、日本初の月着陸に向けて順調に飛行を続けています。10月4日には地球を公転する月の重力を利用して軌道を変更する月スイングバイが実施されました。【2023年10月7日10時】

SLIMは月面へのピンポイント着陸技術を検証するための探査機です。アメリカ航空宇宙局(NASA)のアポロ計画で使用された月着陸船や、2023年8月23日にインドとして初めて月着陸に成功したインド宇宙研究機関(ISRO)の月探査ミッション「チャンドラヤーン3号(Chandrayaan-3)」の着陸船などは、月面に対して垂直の姿勢で着陸しました。一方、SLIMは月周回軌道を離れてからは月面に対して垂直の姿勢で降下するものの、着陸直前に機体を斜めに傾けて横向きに接地するという特徴的な着陸方法を採用しています。
垂直姿勢で接地する従来の探査機では傾斜が大きな斜面などには着陸できず、安全に降りられる場所が限られてきました。これに対し、水平姿勢で接地するSLIMは今まで避けられてきた斜面への着陸にも対応できることから、科学的に興味深い場所を優先した「着陸したい場所への高精度着陸の実現」に貢献することが期待されています。

SLIMはJAXAのX線分光撮像衛星「XRISM(クリズム)」とともに「H-IIA」ロケット47号機に相乗りする形で、2023年9月7日8時42分に鹿児島県の種子島宇宙センターから打ち上げられました。地球を周回する楕円軌道に一旦投入された後は太陽電池で電力を発生させるために欠かせない太陽捕捉制御に成功し、軌道制御に必要な推進システムなどの機能も健全に動作することが確認されたことから、JAXAは2023年9月14日にSLIMのクリティカル運用期間(機体の状態を確認し、最低限の運用ができる状態にするための期間)の終了を発表していました。
関連:JAXAの天文衛星XRISMと月探査機SLIMが初期クリティカル運用期間を無事終了(2023年9月15日)
JAXAによると、遠地点(地球から最も離れる軌道上の一点)高度を引き上げる2回のエンジン噴射を経た2023年10月1日未明には、SLIMを月へ向かわせるための軌道修正操作が実施されました。その2日半後の2023年10月4日午後、SLIMは月周回軌道投入に向けて軌道を変更するために月の高度5000km付近を通過する月スイングバイを行いました。SLIMのX(旧Twitter)公式アカウントでは、月スイングバイの約45分前に航法カメラで撮影された月の画像が公開されています。

SLIMのミッションでは着陸機自身のエンジンと限られた推進剤で月へ向かうために、飛行時間が長くなる代わりに推進剤の消費量が少ない軌道を採用しています。そのため、月スイングバイを終えたSLIMは月や地球から一旦大きく離れるような軌道を飛行した後で月周回軌道に入ることになります。SLIMは打ち上げから3~4か月後に月周回軌道へ到着し、月を約1か月間周回した後で日本初となる月着陸を実施する予定です。

なお、SLIMには「LEV-1」および「SORA-Q(LEV-2)」という2機のローバー(探査車、探査ロボット)が搭載されています。LEV-1とSORA-QはSLIMから着陸直前に分離され、月面到達後は画像の取得と地球へのデータ送信を連携して行う予定です。
関連:愛称「SORA-Q」タカラトミー等が開発の変形型探査ロボ、2022年度に月面へ(2022年3月25日)
2基のうちLEV-1はSLIMが地球周回軌道を飛行していた2023年9月28日に電源を投入してチェックアウトが行われましたが、この時にLEV-1からアマチュア無線の周波数で送信された電波が和歌山大学の12mパラボラアンテナを使用して受信されました。これによりLEV-1の健全性が確認されたということです。
Source
- JAXA - 小型月着陸実証機(SLIM)の地球周回フェーズから月遷移フェーズへの移行完了について
- 小型月着陸実証機SLIM (X, fka Twitter)
- 和歌山大学 - 成功しました!アマチュア無線超長距離通信実験<日本の月着陸機SLIM×和歌山大12mパラボラ>
文/sorae編集部